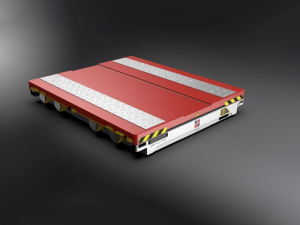
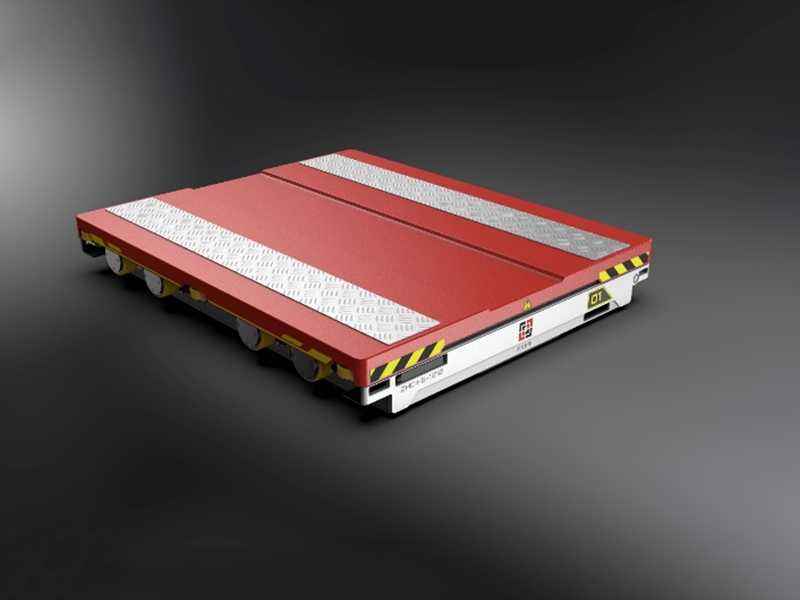
高速アプリケーション向け4Dシャトルシステム
標準的なビジネス
倉庫外での受領書の組み立てと保管
移転と在庫課金の変更レイヤー
技術的パラメータ
| プロジェクト | 基本データ | 述べる | |
| モデル | SX-ZHC-H- 1210-2T | ||
| 適用トレイ | 幅: 1200mm 奥行き: 1000mm | ||
| 最大荷重 | 最大1500kg | ||
| 身長/体重 | 本体高さ:150mm、シャトル重量:350KG | ||
| ウォーキングメインX方向 | スピード | 最大無負荷時: 3.0 m/s、最大全負荷時: 2.0 m/s | |
| 歩行加速 | ≤ 1.0m/S2 | ||
| モーター | ブラシレスサーボモーター 48VDC 1 5 00W | 輸入サーボ | |
| サーバードライバー | ブラシレスサーボドライバ | 輸入サーボ | |
| Y方向に歩く | スピード | 最大無負荷時: 2.0 m /s、最大全負荷時: 1.0 m/s | |
| 歩行加速 | ≤ 0.6m/S2 | ||
| モーター | ブラシレスサーボモーター 48VDC 1500W | 輸入サーボ | |
| サーバードライバー | ブラシレスサーボドライバ | 輸入サーボ | |
| 貨物ジャッキ | ジャッキ高さ | 30 mm _ | |
| モーター | ブラシレスモーター 48VDC 75 0W | 輸入サーボ | |
| メインジャッキ | ジャッキ高さ | 35ミリメートル | |
| モーター | ブラシレスモーター 48VDC 75 0W | 輸入サーボ | |
| メインチャネル/測位方法 | 歩行測位:バーコード測位/レーザー測位 | ドイツ P+F/SICK | |
| セカンダリチャネル/ポジショニング方法 | 歩行位置決め:光電式+エンコーダ | ドイツ P+F/SICK | |
| トレイの位置決め:レーザー+光電 | ドイツ P+F/SICK | ||
| 制御システム | S7-1200 PLCプログラマブルコントローラ | ドイツ シーメンス | |
| リモコン | 動作周波数433MHZ、通信距離は少なくとも100メートル | カスタマイズしたインポート | |
| 電源 | リチウム電池 | 国内高品質 | |
| バッテリーパラメータ | 48V、30AH、使用時間≥6時間、充電時間3時間、充電可能回数:1000回 | メンテナンスフリー | |
| 速度制御方法 | サーボ制御、低速定トルク | ||
| クロスバー制御方式 | WCSスケジュール、タッチコンピュータ制御、リモートコントロール制御 | ||
| 動作騒音レベル | ≤60db | ||
| 塗装要件 | ラックコンビネーション(黒)、トップカバー(赤)、フロントおよびリアアルミ(白) | ||
| 周囲温度 | 温度:0℃~50℃ 湿度:5%~95%(結露なし) | ||
確認コードを入力してください